by Martina Haefeli | Oct 12, 2016 | Machine Learning, Robotics
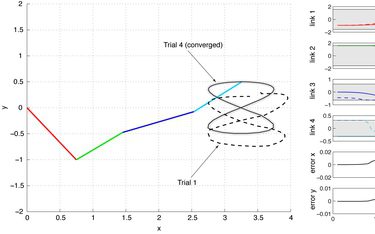
A Task-level iterative learning control algorithm for accurate tracking in manipulators with modeling errors and stringent joint position limits We present an iterative learning control algorithm for accurate task space tracking of kinematically redundant...
by Martina Haefeli | Oct 11, 2016 | Robotics
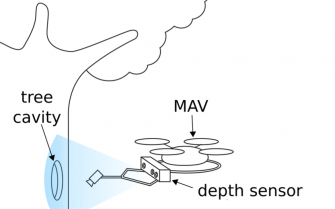
Tree Cavity Inspection Using Aerial Robots We present an aerial robotic platform for remote tree cavity inspection, based on a hexacopter Micro-Aerial vehicle (MAV) equipped with a dexterous manipulator. October 11, 2016IEEE/RSJ International Conference on...
by Martina Haefeli | Oct 11, 2016 | Robotics
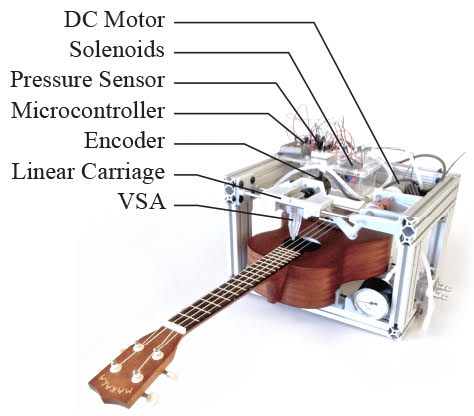
Mechanical Implementation of a Variable-Stiffness Actuator for a Softly Strummed Ukulele This research illustrates the design, implementation, and evaluation of pneumatic variable-stiffness actuator (VSA) used to strum a four-stringed ukulele with audio...
by Martina Haefeli | Oct 11, 2016 | Animation, Visual Computing
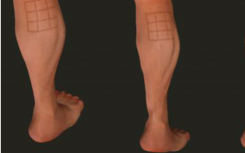
Dynamic Skin Deformation SimulationUsing Musculoskeletal Model and Soft Tissue Dynamics In this paper, we present an algorithm that generates natural, dynamic, and detailed skin deformation (movement and jiggle) from joint angle data sequences. October 11,...
by Martina Haefeli | Oct 11, 2016 | Robotics
Task-based Limb Optimization for Legged Robots In this paper, we propose such a model to codesign the motion and leg configurations of a robot such that a measure of performance is optimized. October 11, 2016IEEE/RSJ International Conference on Intelligent Robots...
