by Martina Haefeli | Sep 24, 2017 | Robotics
Validation of the Robot Social Attributes Scale (RoSAS) for Human-Robot Interaction through a Human-to-Robot Handover Use Case This work aims to validate the Robotic Social Attributes Scale (RoSAS) for human-robot interaction. September 24, 2017IROS 2017 Workshop on...

by Martina Haefeli | Sep 24, 2017 | Robotics
Snapbot: a Reconfigurable Legged Robot We develop a reconfigurable legged robot, named Snapbot, to emulate configuration changes and various styles of legged locomotion. September 24, 2017IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)...

by Martina Haefeli | Sep 24, 2017 | Robotics
Handshakiness: Benchmarking for Human-Robot Hand Interactions We present results from human studies with the benchmarking experiments, providing a baseline for comparison with robot hands as well as presenting new insights into human handshaking. September 24,...

by Martina Haefeli | Sep 24, 2017 | Robotics
Onboard Real-time Dense Reconstruction of Large-scale Environments for UAV In this paper, we propose a GPU parallelizedSLAM system capable of using photometric and inertial datatogether with depth data from an active RGB-D sensor to buildaccurate dense 3D maps of...
by Martina Haefeli | Sep 24, 2017 | Robotics
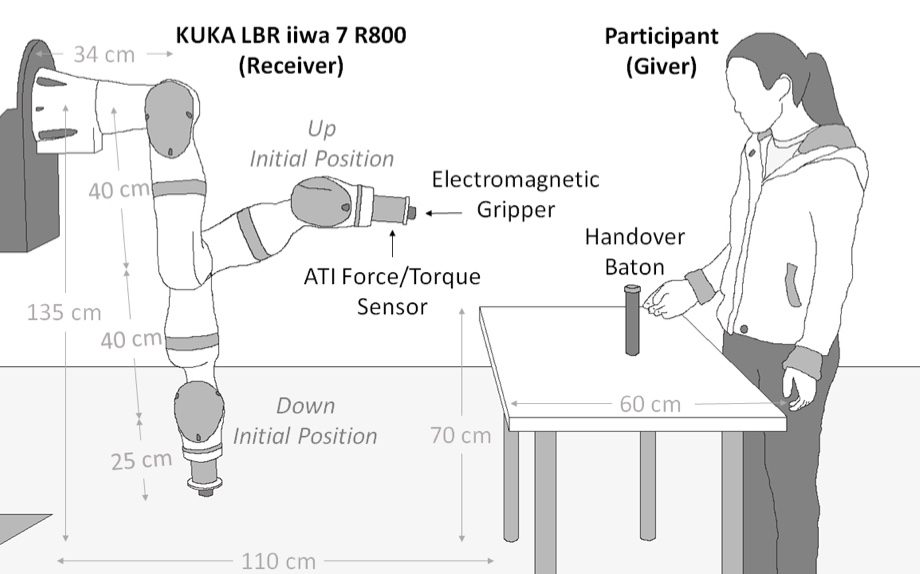
Toward torque control of a KUKA LBR IIWA for physical Human-Robot Interaction In this paper, we examine joint torque tracking as well as estimation of external torques for the KUKA Lightweight Robot (LBR) IIWA. September 24, 2017IEEE/RSJ International Conference on...
